
圖、輸送機械自動化設備廠商MagneMotion向Rockwell Automation提起「確認之訴」
壹、前言
如同本案的狀況(如表一所列),MagneMotion即向Rockwell Automation提出確認之訴,認為Rockwell準備向法院控告MagneMotion侵權提出的US5,936,319A、US5,965,963A、US5,994,798A、US6,274,952B1、US6,713,902B2、US6,784,572B1、US6,803,681B2、US6,876,107B2、US7,026,732B1、US7,456,593B1、US7,781,993B1,以及US8,076,803B2等十二件專利中部份是無效的,而部份即便是有效,MagneMotion自家產品也沒有侵害其專利權。
根據聯邦巡廻上訴法院判斷受理「確認之訴」(Declaratory Judgment)的基礎來看,專利權人若已對疑似侵權人(即被告方)構成明顯訴訟威脅,以及認為被告方現在活動已構成侵權行為或明確表現出企圖進行專利侵權活動之虞時,被告方得提起確認之訴,請求法院確認專利無效、不侵權及無執行力(陳清暐,2010)。因此,確認之訴可視為商場上的策略,讓被告方能在真正進行專利訴訟程序之前即主動攻擊專利權人。
表一、專利訴訟案件基本資訊
| 訴訟名稱 |
MAGNEMOTION INC. v ROCKWELL AUTOMATION INC. |
| 提告日期 |
2014年11月24日 |
| 本案原告 |
MAGNEMOTION INC. |
| 本案被告 |
ROCKWELL AUTOMATION INC. |
| 訴訟案號 |
4:14-cv-40172 |
| 訴訟法院 |
麻薩諸塞州地區法院 |
| 爭議專利 |
US 5,936,319 A、US 5,965,963 A、US 5,994,798 A、US 6,274,952 B1、US 6,713,902 B2、US 6,784,572 B1、US 6,803,681 B2、US 6,876,107 B2、US 7,026,732 B1、US 7,456,593 B1、US 7,781,993 B1,以及US 8,076,803 B2 |
| 爭議產品 |
線性同步馬達(Linear Synchronous Motor,簡稱LSM)技術 |
| 訴狀下載 |
 |
貳、兩造間的互動
MagneMotion是一家位於麻薩諸塞州的智慧型輸送機械自動化系統製造商(Manufacturer of Intelligent Conveying Systems),主要創始人是原麻省理工學院教授Dr. Thornton與其博士班畢業生Dr. Clark T.及Dr. Perrault B.。自1996年營運至今,員工已成長到將近90人,專精於馬達及磁體陣列的設計製造、線性同步馬達(Linear Synchronous Motor,簡稱LSM)定位偵測/通訊/控制技術,以及磁懸浮/推進/切換技術等。Rockwell Automation則是一家位於威斯康辛州專門提供工業自動化、電源、控制及資訊方案且年營收超過二百億美元的大公司,員工約有22,000人,著名產品是用來控制導軌上多個移動裝置的「i-TRAK®」。而兩者之間的爭端係肇因於MagneMotion自行研發的LSM技術。
一直到Rockwell Automation在2014年11月12日向MagneMotion寄出專利侵權的警告信函,並指稱MagneMotion的LSM相關技術及產品已侵犯其專利權,並在該信函中引述到Rockwell Automation與Beckhoff Automation GmbH一案(即2:13-cv-01616)中使用的五件系爭專利(US5,994,798A、US5,965,963A、US6,274,952B1、US6,803,681B2、US6,713,902B2),並言明與Beckhoff Automation GmbH一案告一段落之後(如表二所列),就會展開對MagneMotion的訴訟程序,並會以其子公司Anorad Corporation與Jacobs Automation掌握的相關專利(如表三所列)提出後續的侵權訴訟。雙方也隨即在2014年11月14日互相推派代表溝通討論相關事宜。
兩家公司其實早在2003年就有類似互動,主要是Rockwell Automation根據其US5,936,319A專利內容討論MagneMotion的產品與技術。但MagneMotion也回覆其產品與技術並沒有侵犯任何專利且說明該US 5,936,319 A係為無效之專利。自此之後,Rockwell Automation過了11年都未再聯絡過MagneMotion。而MagneMotion也從未改弦易轍並持續投入時間和資金研發其產品並販售到市場中。這兩家公司,甚至,在2010年左右還有合作開發產品跟技術的經驗。在合作期間裡,Rockwell Automation有很多機會接觸並觀察MagneMotion的產品與技術,其中就包括本案述及的LSM技術;但都未嘗針對該相關技術提出任何指教或異議!
表二、與本案相關訴訟案資訊
| 時間 |
案件編號 |
對造雙方 |
| 2010/11/10 |
3:10-cv-00718-WMC |
Rockwell Automation, Inc. et al. v WAGO Corporation et al. |
| 2012/01/20 |
2:12-cv-10274-GCS-MKM |
Rockwell Automation Technologies, Inc. v Secure Crossing Research and Development, Inc. |
| 2012/03/06 |
3:12-cv-00566-WHQ-WMC |
Rockwell Automation, Inc. v Kontron Modular Computers |
| 2013/09/05 |
2:12-cv-01616 |
Rockwell Automation, Inc. v Beckhoff Automation LLC et al. |
表三、Rockwell Automation針對MagneMotion LSM技術提出之系爭專利資訊
| 專利權人 |
專利號 |
專利名稱 |
| Jacobs Automation |
A |
8,076,803 |
Controlled motion system |
| B |
6,876,107 |
Controlled motion system |
| Anorad Corporation |
C |
7,781,993 |
Path module for a linear motor, modular linear motor system and method to control the same |
| D |
7,456,593 |
Direct drive transport system |
| E |
7,026,732 |
Path arrangement for a multi-track linear motor system and method to control same |
| F |
6,803,681 |
Path module for a linear motor, modular linear motor system and method to control same |
| G |
6,784,572 |
Path arrangement for a multi-track linear motor system and method to control same |
| H |
6,713,902 |
Closed-path linear motor |
| I |
6,274,952 |
Closed-path linear motor |
| J |
5,994,798 |
Closed-path linear motor |
| K |
5,965,963 |
Linear motor with a plurality of stages independently movable on the same path |
| L |
5,936,319 |
Wireless permanent magnet linear motor with magnetically controlled armature switching and magnetic encoder |
參、本案涉及的系爭專利
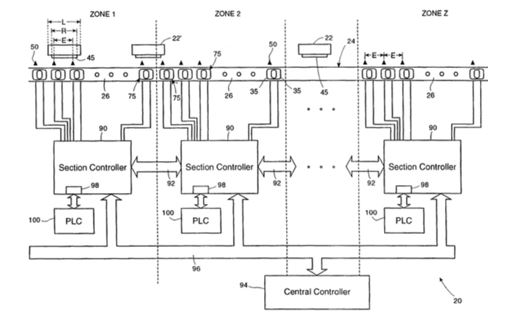
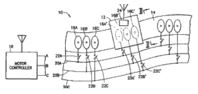
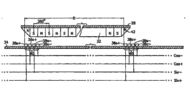
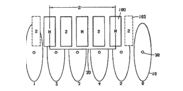
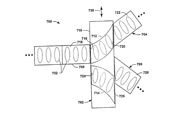
MagneMotion在本案中向法院表示,當初USPTO審查這些系爭專利時並未考慮到一些文獻資料,包括:伯克萊加州大學Sands B.D.在1992年撰寫的一篇Working Paper (篇名為The Transrapid Magnetic Levitation System: A Technical and Commercial Assessment)、Wiesman等人在1995年發表的技術報告 (篇名為Design and Demonstration of a Locally Commutated Linear Synchronous Motor),以及一篇加拿大Automation Tooling System與Agile System Inc.兩間公司在1998年申請的WO98/50760 (專利名稱為Modular Conveyor System Having Multiple Moving Elements Under Independent Control)。前述文獻資料中,第一篇是針對LSM的導軌設計了一段具備推進力且可移動式的彎曲繞組設計(a moveable section of track having propulsion windings)(如圖二),第二篇是設計具減震效益LSM控制器使用的線性二次高斯控制方法(即Linear Quadratic Gaussian,簡稱LQG),而WO98/50760專利則是提出一個在獨立控制條件下可模組化成多個可移動式元件的輸送系統(如圖三)。整個輸送系統會由一個中央控制器串接到每個模組上的區段控制器整合所有控制訊號與輸送程序。這些前案文獻所提之機制、技術或方法都會影響到Rockwell Automation用來興訟使用的系爭專利是否仍然有效並能主張其專利權的問題。
圖二、在導軌上某一段具備推進力且可移動式的彎曲繞組設計(俯視圖)
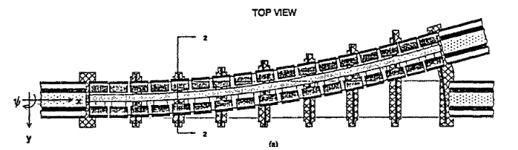
資料來源:Sands B.D. (1992, Fig.11)
圖三、可模組化成多個可移動式元件的輸送系統
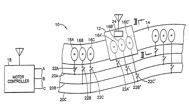
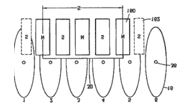
Rockwell Automation準備的系爭專利共有十二件,分屬其子公司Jacobs Automation與Anorad Corporation。其中,Jacobs Automation有兩件專利(即表二中的A與B)都源自於相同一件2007年的臨時申請案(60/951,282),屬由同一專利技術所衍生的發明(即同族專利),分別在歐洲與美國申請了專利(其他公開專利包括WO2003105324A1、WO2009015249A3、US6876107B2、US7859139B2、US8076803B2、EP2183844A4、EP1547230A4與EP2747257A3)。進一步比較專利A與B第一權利項內容(如表四所列),兩者相同之處在於前言與前兩項元素,即「一種受控運動系統,包括:軌道與多個可移動裝置(可沿著路徑)動態掛載到軌道上」。相異之處:專利A說明至少有一個智能區段(smart section,即圖四(a)中編號100所指),包含多個與軌道(track,即圖四(c)中編號10所指)及可移動裝置(mover,即圖四(c)中編號40所指)聯接在一起(associated with)的主動與被動元件,以便用來驅動並控制前述可移動裝置能夠沿著第一區段路徑獨立移動,而且還有多個由軟式磁性複合材料組成的磁極鐵心(即圖四(b)中編號410所指)。而專利B針對主動與被動元件另外點出其功能係用來控制可移動裝置在路徑上的位置。其中,主動元件會與控制器聯接在一起,用來控制可移動裝置的推動力。另外還有磁阻感測器(magnetoresistive sensor,即圖四(d)中編號410所指),用來感應可移動裝置在路徑上的位置資訊。這些感測器都與控制器聯接在一起!感測器會將位置格式(position formation)從可移動裝置傳送出來,速度比每秒一萬公尺更快;控制器則是用來控制各個可移動裝置彼此間動作上的獨立性。
表四、Jacobs Automation專利A、B在第一權利項內容的異同處
| |
專利A |
專利B |
| 相同 |
- A controlled motion system, comprising:
- a track;
- a plurality of movers movably mounted on the track ( for moving along a path );
|
| 相異 |
- at least one smart section, further comprising active and reactive elements associated with the track and movers and configured for driving and controlling the movers independently along at least one first segment of the path;
- the at least one smart section further comprising a plurality of pole pieces;
- said pole pieces comprised of a soft magnetic composite material.
|
- active and reactive elements associated with the track and movers and configured for driving and controlling the position of the movers along the path;
- a controller operably associated with the active elements for controlling the driving of the movers;
- a position sensor configured for sensing position information corresponding to the true absolute position of the movers along the path;
- wherein the sensor is associated with the controller for transmitting the position information to the controller, the sensor being configured such that position formation is transmitted from the movers through substantially the entire sensor at a sensing speed faster than about 10,000 meters per second, and the controller is configured for controlling the movement of at least one of the movers independently from the others.
|
圖四、Jacobs Automation專利A、B圖示
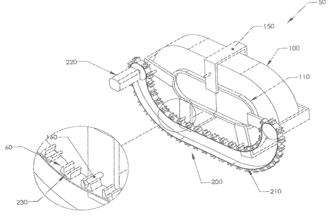
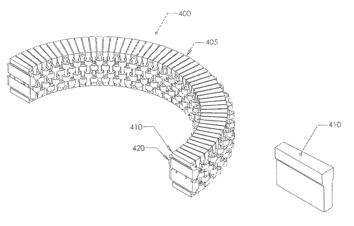
(a) 專利A Fig. 1 (b) 專利A Fig. 5
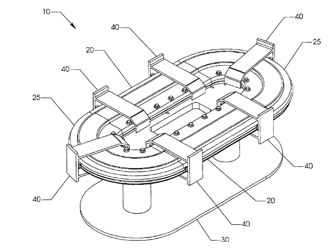
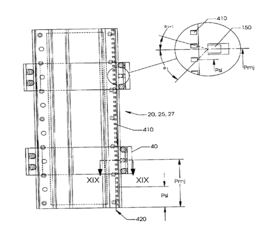
(c) 專利B Fig. 1 (d) 專利B Fig. 19
另外,Anorad Corporation有十件系爭專利,並進一步將與其間存在技術分割、延續或可相互組合使用等等關係的專利進行綜整分析後可以找出五個不同技術群組(如圖五所示):深藍節點(5,907,200、5,925,943、5,936,319、5,942,817、5,965,963、5,994,798)、淺藍節點(6,803,681、6,975,081、7,170,241、7,781,993)、深綠節點(6,274,952、6,455,957、6,713,902)、淺綠節點(6,417,584、6,784,572、7,026,732),以及自成一群的7,456,593(即紅色節點)。其中,以黑色箭頭所指的節點即為本案述及之Anorad Corporation系爭專利。從圖四可以明顯看到6,274,952在整個Anorad Corporation所佈的專利網絡中扮演相當重要的紐帶角色,技術脈絡上承襲自5,994,798與5,942,817,透過它還接連了其他四個技術群組,繼而演化出其他深綠圈、淺綠圈或淺藍圈三個不同方向的佈局策略。
圖五、Anorad Corporation系爭專利技術佈局脈絡
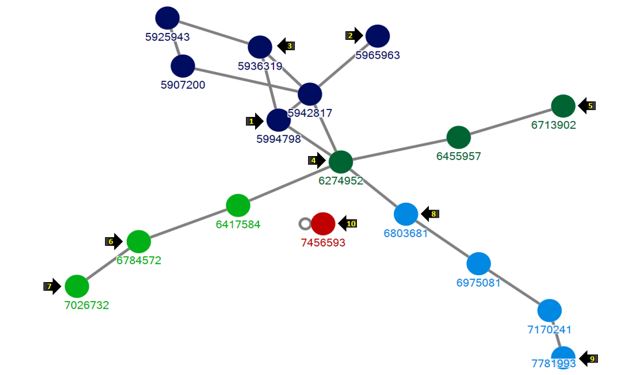
註:專利間存在技術分割、延續與可相互組合使用的關係
以前述五大技術群組為基礎並分析十件系爭專利第一權利項內容、重要圖示,以及主要的技術屬性可以大致瞭解(如表五),深藍群組主要聚焦在「如何控制線性步進馬達電樞和磁體的裝置或方法」(技術群組一),淺藍群組是「控制線性步進馬達的交流電的裝置或方法」(技術群組二),深綠群組研發焦點放在「使用Hall-Effect或其他電磁裝置測量其與磁場間相對運動產生的磁性變量的裝置或方法」(技術群組三),淺綠群組是設計出能「有效組態永磁型步進馬達使用之模組化路徑構件的裝置或方法」(技術群組四),而自成一群組的紅色節點則是設計「輸送設備上與驅動器相互耦合的磁能裝置或方法」(技術群組五)。
Anorad Corporation在技術上的演化路徑係由線性步進馬達電樞和磁體的控制機制的設計開始,再分往交流電控制裝置或方法、磁性變量量測裝置或方法,以及模組化路徑構件的設計等議題深入發展。而7,456,593(即專利D)則是進一步聚焦在傳輸設備上磁性驅動器的設計,另外還包括載物台自動導引機制、模組化路徑的組構機制,以及網路通訊的功能等等議題。國內輸送機械自動化設備相關廠商可以進一步詳細整合歸納表三所列專利在技術保護範圍上的差異性,系統化瞭解Rockwell Automation佈局在i-TRAK®上的關鍵技術。例如以專利6,274,952來看,它繼承了系爭專利5,994,798在「電樞繞組」上的技術特徵,繼而結合群組二及四所指「路徑」導引機制的設計概念形成一個完整的智慧製造輸送系統的運作環境。
表五、Anorad Corporation專利C~L在第一權利項內容
| 群組 |
第一權利項內容 |
重要圖示 |
| 技術群組一 |
L |
線性馬達包括:路徑,其中包含多個電樞繞組與磁致動開關(與電樞繞組相接)、裝載可動式線性馬達的裝載物台(會有馬達永磁體以適應路徑與電樞繞組)、載物台上有可移動的開關式永磁體(需考慮其大小尺寸與被放置的位置,以便磁性能有效影響到的範圍內設置致動式開關)、載物台上有可移動的編碼器磁體(具有交替磁極的多個磁區,設置至少一個感測器產生有效的編碼器訊號,該訊號用來確定載物台所在位置)。 |
 |
| K |
線性馬達包括:馬達控制器、路徑,其中包含多個電樞繞組、至少會有第一與第二線性馬達載物台單獨在路徑上移動,其中第一與第二載物台上會有多個馬達永磁體以因應路徑與電樞繞組、在第一載物台上會有第一編碼器,該編碼器包含無線通訊功能能將載物台的動作跟位置傳給馬達控制器、在第二載物台上也會有第二編碼器,該編碼器也包含無線通訊功能將載物台的動作跟位置傳給馬達控制器、前述路徑包含用來針對馬達控制器提供第一驅動電能的第一方法,以便讓第一載物台上的馬達永磁體能含括在電樞繞組磁性影響範圍內、前述路徑包含用來針對馬達控制器提供第二驅動電能的第二方法,以便讓第二載物台上的馬達永磁體能含括在電樞繞組磁性影響範圍內,前述第一及第二方法會同時運作但第一及第二線性馬達載物台使用的驅動力是同步但彼此之間獨立的運作的。 |
 |
| J |
線性馬達包括:路徑,其中包含多個電樞繞組、多個開關,其中每個開關控制的電源都來自前述電樞繞組、在路徑上可移動的線性馬達載物台,其中載物台上有多個馬達永磁體以因應路徑與電樞繞組、需要用來控制開關致能的方法並確認多個電樞繞組是被放置在馬達永磁體磁能範圍內、前述路徑是個封閉路徑且需要用來控管線性馬達載物台在封閉路徑上旅行的方法。 |
 |
| 技術群組二 |
F |
線性馬達的路徑模組包括:至少一個電樞繞組、接連在電樞繞組上的放大器、與放大器耦合一起的模組控制器,該模組控制器用來控制放大器,根據馬達控制器所下指令選擇致能電樞繞組,路徑模組可以端對端相接連形成一路徑,該路徑中任一模組都有不同的位址,以便獨立控制其上的電樞繞組。 |
 |
| C |
線性馬達系統包括:多個實體相仿的路徑模組可以用來組成一個或多個路徑輸送至少一個載物台,該路徑模組至少包括多個資料接收元件,用來接收位置相關的脈衝資料、控制處理器元件,利用收到的脈衝資料決定載物台的位置或速度。 |
| 技術群組三 |
I |
線性馬達系統包括:線性馬達使用的路徑,該路徑包括至少一個用來提供接收電能的電樞繞組、至少一個跟電樞繞組耦合一起的開閉、可以沿著路徑動移的載物台,該載物台包括至少一個開關磁體與馬達磁體彼此相互作用,進而影響並控制載物台運作電源的供應。 |
 |
| H |
線性馬達系統包括:用來支援並導引多個載物台的線性路徑,該線性路徑有多個電樞繞組、多個開關,部份會接連到前述電樞繞組、多個載物台,部份至少會有一個開關磁體,用來控制電樞繞組與馬達磁體間的電能,繼而影響到載物台在路徑上的動作。 |
| 技術群組四 |
G |
線性馬達使用的路徑包括:第一路徑段會有多個電樞繞組、從第一路徑段出來的旅行方向至少會有兩個分支路徑段、路徑段包括多個電樞繞組、路由系統,至少有一個電樞繞組,放置在第一路徑段與至少兩個分支路徑段之間,該路由系統影響到載物台在第一路徑段與被選取分支路徑段間的動作。 |
 |
| E |
一個會沿著可選路徑導引載物台的系統包括:第一路徑有多個電樞繞組的被放置在表面,從第一路徑分支出來的第二與第三路徑的電樞繞組也被放置在表面並與第一路徑的電樞繞組耦合在一起。 |
| 技術群組五 |
D |
線性馬達控制系統包括:線性載物台,其包括第一行動磁性元件與第一行動磁性元件、第一固定磁性元件會磁化接連到第一行動磁性元件、第二固定磁性元件會磁化接連到第二行動磁性元件、第一控制器放置在第一固定磁性元件與第一行動磁性元件之間,用來致能第一範圍位置的線性載物台、第二控制器放置在第二固定磁性元件與第二行動磁性元件之間,用來致能第二範圍位置的線性載物台。 |
 |
肆、結論
從防禦角度來說,當可能面臨專利訴訟時,可以就案件之程序或實體面主張其權益,例如提起確認之訴,從被動變成主動攻擊的角色,請求法院確認對造雙方間專利侵權關係是否存在,藉以平衡訴訟的主動性或是儘快釐清不相關確認因素的常見手段(May,2010;Jenny,2010;Gabriel Chao,2011;LCL,2013;Viola,2014),也有助於後續和解談判程序的進行(Aaron,2011)。基本上,確認之訴的目的在雙方當事人對於某種「法律關係」發生爭議而無法解決的時候訴請法官予以認定前述關係是否成立。因此,就專利侵權訴訟來說,疑似侵權方(即被告方)如果向法院提出確認之訴通常都會主張自己並未侵權,同時主張原告的專利權是無效或無執行力。
一般來說,提起這類訴訟的好處是審理較快、可以知道是否構成侵權、費用有可能比較低,以及被告方有主動權。但也有風險,原告一定會提起反訴,而且通常會要求加重賠償的請求。不過,被告方除了向聯邦地方法院提出專利有效性疑議,也可以向USPTO或是在ITC程序中提出解決系爭專利有效性的申請。但三種管道在審查基準和證據調查制度上都有其特性,被告方需先清楚其間的優劣勢再決定選擇透過哪一種平台來進行(陳秉訓,2009,第94~100頁)。
在本案中,MagneMotion向麻薩諸塞州地區法院提起確認不侵權訴訟攻擊Rockwell Automation意欲行使其專利權的動作。因此,MagneMotion提出三項文獻資料證明Rockwell Automation為了提出侵權訴訟而準備的系爭專利應為無效的可能原因。同時,MagneMotion也認為雙方早在2003年就已經針對是否存在技術或產品侵權的問題互動溝通過。而且,雙方在2010年左右也針對LSM相關技術與產品合作研發過。但截至本案發生之前,十一年來Rockwell Automation都沒有進一步提出任何侵權訴訟的動作。
因此,MagneMotion認為,部份系爭專利應該是無效,就算專利仍然有效,法院也應在「衡平禁反言原則」(the Doctrine of Equitable Estoppel)與「懈怠原則」(the Doctrine of Laches)的前提下,考量Rockwell Automation多年來始終保持沉默而遲延提出侵害專利之訴訟,已有誤導當事人並構成怠惰行使權利的情形(朱子亮,2016a),能做為未來Rockwell Automation真正提出專利侵權時,MagneMotion用以防禦抗辯其LSM技術與產品並未侵權或甚至排除Rockwell Automation能夠獲得侵權賠償或權利金之事由。一般來說,這類透過主張權利懈怠原則排除原告獲得禁制令及持續性權利金等針對既有及未來侵權情形之衡平救濟策略(朱子亮,2015),可用於反擊Patent Troll慣用之潛水艇式專利伏擊動作。
不過,2015年6月16日,雙方經談判後已撤銷本案(Stipulation of Dismissal)。而且,Rockwell Automation為了加強i-TRAK®在專利佈局上的強度,也在2016年2月正式收購MagneMotion成為旗下子公司之一。MagneMotion的系統被廣泛應用於工業領域,包括汽車和一般裝配、包裝以及材料搬運。Rockwell Automation副總裁兼總經理Marco Wishart即表示(Magnemotion,2016),透過這個併購動作能讓i-TRAK®與MagneMotion掌握的輸送系統技術間形成良好的優勢互補,繼而優化全廠產線控管機制面的生產彈性與效能(flexibility and productivity),完善Rockwell Automation針對智慧製造工廠推出的解決方案。
2008年之後,許多國家紛紛提出再工業化振興戰略,希望能透過提升製造技術,創造高附加價值的生產活動,進而帶動經濟發展並創造就業機會。因此,各國為了維持製造業競爭優勢,多以政策主導並持續加強創新研發預算在相關的戰略性關鍵材料、新興智能技術或製程研發工作上,企圖透過一系列產業及技術的匯流與創新,強化產業核心競爭力,力爭邁入智慧製造強國的行列。
台灣自然也沒有自外於這股智慧製造潮流之外。但以目前來看,台灣的智慧製造產業結構並不完整,在智慧製造技術上的專利佈局也相對薄弱(陳賜賢,2016),尤其是控制系統(含軟體)相關技術的發展更是明顯落後。未來,在政策推動下,相信台灣會有越來越多廠商投入智慧製造技術的研發工作,因此也會有更多與其他競爭者短兵相接的機會,面對未來可能的訴訟威脅,例如Rockwell Automation即在2016年8月5日向美國ITC指控台灣研華科技的工業機械控制系統及其使用的軟體都侵害到Rockwell Automation的多件專利(朱子亮,2016b)。
有鑑於此,國內有志投入智慧製造系統或技術的相關廠商需要持續關注市場中相關競爭者動態,尤其是專利侵權相關事件,並詳細針對系爭專利設計概念、目的、技術內容及權利項範圍等內容系統化分析其研發佈局脈絡,確認技術佈局上的優劣勢與完整度,並從中瞭解競爭者在研發策略與技術上的發展重點與趨勢,減少重複投入研發及投資的浪費,儘早知悉競爭者技術資訊並制定相應的研發決策,提昇市場競爭能力。(6782字;圖1;表5)
參考資料
- Aaron (2011/03/02),Sandisk化被動為主動,對MMI提出確認之訴。
- Gabriel Chao (2011/11/30),Carl Zeiss控告Optovue及MIT 提出確認之訴。
- Jenny (2011/03/16),連接器之爭,嘉澤控告鴻海。
- LCL (2013/05/13),雲端服務平台專利確認之訴 Activevideo Networks控告Trans Video Electronics
- Magnemotion (2016/02/10), Rockwell Automation to Acquire MagneMotion, a Leading Manufacturer of Intelligent Conveying Systems.
- May (2010/01/29),緯創反擊,在美控告東芝專利無效。
- Peltier K.D., Lankin R.G., Robinson W.M., Mackay D.K., Fortuna J.J. Madusuthanan S., Lindsay S.C., Cybulski M.A., Hancock M.J., Holl R.A., and Mowat D.J.(1998/05/01), Patent No. WO98/50760, Modular Conveyor System Having Multiple Moving Elements Under Independent Control.
- Sands B.D.(1992), The Transrapid Magnetic Levitation System: A Technical and Commercial Assessment. Working Paper, UCTC No.183.
- Viola (2014/06/13),專利不侵權確認之訴TSMC提告Zond。
- Wiesman R., Fontana R., Cope D., and Gamble B.(1995), Design and Demonstration of a Locally Commutated Linear Synchronous Motor. SAE Technical Paper No.951919.
- 朱子亮(2015/10/16),美聯邦巡迴上訴法院確認權利懈怠原則可排除專利侵權法律救濟:SCA Hygiene Products案。
- 朱子亮(2016a/11/9),美最高法院將複審權利懈怠可否排除侵權賠償議題:SCA Hygiene案。
- 朱子亮(2016b/09/08),工業自動化技術專利訴訟 Rockwell控告3S-Smart、研華科技。
- 陳秉訓(2009/11),美國專利訴訟制度:以專利有效性問題為中心。智慧財產權月刊,第131期,頁67-101。
- 陳清暐(2010),專利訴訟之被告防禦方法-以確認專利無效及不侵權訴訟為中心。清華大學科技法律研究所碩士論文。
- 陳賜賢(2016/06/03),從專利分析看智慧製造 台灣的挑戰與機會。
- 顏吉承(2010/06/03),台灣專利侵權訴訟案例剖析(四)。
本站相關文章:
- 中國大陸『十三五規劃』對台灣企業之影響:(四) 兩岸工業用機器人產業政策之觀察
- 工業自動化技術專利訴訟 Rockwell控告3S-Smart、研華科技
- 中國美的集團擬收購德國庫卡 搶入工業機器人市場
- W-TEAM 自動化生產整合優勢能量
- 人工智慧結合機器人將於2021年搶走6%美國人工作