
蘋果公司新專利:涵蓋LiDAR探測和擋風玻璃上顯示信息
科技產業資訊室 (iKnow) - May 發表於 2018年4月11日
圖、蘋果公司新專利:涵蓋LiDAR探測和擋風玻璃上顯示信息
蘋果公司的AI開發計畫Project Titan,終於在2018年美國USPTO申請專利中開始出現。雖然,像特斯拉這樣的其他公司正在爭奪自動駕駛汽車市場,但自動駕駛車輛尚未準備好迎接黃金時代,卻也看到蘋果正在投入時間及資源來解決自駕車仍存在眾多個問題。
從蘋果的許多專利申請來看,他們正在努力減輕日間眩光干擾車輛視覺系統,甚至白天在夜間黑暗中或隧道內行駛的危險。為了安全起見,蘋果正在以全新的方式思考如何整合抬頭顯示器和自定義手勢系統,放入車輛窗戶上。駕駛人可能需要先進的混合現實(MR)裝置及體驗,才能在這種車輛中看到車外的路況。現在來看看下面兩件Apple新專利申請。
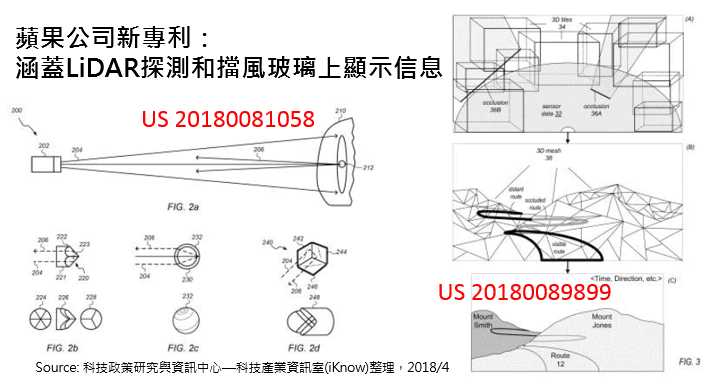
- US 20180081058:Enabling LIDAR Detection
- US 20180089899:Adaptive Vehicle AR Display using 3D Imagery
US 20180081058:Enabling LIDAR Detection
在車輛上啟動LiDAR激光雷達。
蘋果公司指出,道路或道路標誌包括反光材料,例如反光塗料或附件,以通過反射光來提高其光學可見度。車道標記通常包括除物理碰撞之外的反射塗料,以確保駕駛員即使在光線不足的情況下也能意識到車道的外邊界。車輛上的牌照還包括反光材料,以更好地照亮車牌上的文字,讓其他司機(包括警察)看到。
自動車輛包括配置成檢測駕駛時可能出現的障礙物的多個感測器。這些障礙物可能包括沿相同道路行駛的其他車輛。
道路上的車輛可以被諸如光檢測和測距(激光雷達)感測器或雷達感測器的感測器檢測到。通過確定激光雷達信號或雷達信號已被車輛反射,感測器通常能夠檢測車輛。
感測器可能不一定能夠通過簡單地具有反射信號來確定障礙物是車輛。通過提高感測器可檢測信號的可用性,通過使感測器更有效,可以改善道路上其他車輛的可檢測性。
Apple的發明利用用於在車輛上啟用激光雷達檢測的系統和方法來解決這個問題,所述系統和方法可以包括被配置為發射光信號的光源,被配置為至少部分地基於從所述光信號反射的光信號來接收反射光信號的接收器感測器多個反射器和控制器。控制器可以被配置為至少部分地基於反射光信號來識別多個反射器的佈置圖案,並且至少部分地基於佈置圖案的識別來確定多個反射器耦合到另一個車輛。
US 20180089899:Adaptive Vehicle AR Display using 3D Imagery
使用3D圖像的自適應車輛AR顯示。
主要涉及自主車輛系統,增強現實(AR)系統可能利用遙感設備提供有關環境中物體的深度信息。在某些情況下,基於激光的傳感技術(如光測距和探測(LiDAR))可以提供高分辨率的環境數據,如深度圖,這可能表明不同物體與LiDAR的接近程度。
即時增強現實(Realtime AR)面臨的各種挑戰,當它是一個在不同的速度和角度通過不斷變化的環境中行駛的車輛的主要顯示技術。天氣條件,陽光和車輛運動學只是可能影響渲染的一些因素,但也會限制系統的整體功能。這一點尤其真實,因為車載感測器具有固定範圍,並且通常需要用於優化查詢的演算法,這會影響整體質量和響應時間。
Apple該發明涵蓋了用於車輛中增強現實(AR)顯示器的方法和系統 - 通常稱為抬頭顯示器。描述了AR系統的實施例,其利用世界的預先生成的立體圖像重建或3D模型來幫助錨定並且改善AR場景的呈現。通過利用世界的立體圖像重構,AR系統的實施例可以使用各種技術來增強系統的渲染能力。在實施例中,AR系統可以從利用隨著時間從大量源收集的現實世界圖像生成的世界的立體照相重建獲得預先生成的3D數據,並且可以使用該預先生成的3D數據(例如,3D網格,紋理和其他幾何信息的組合)來確定關於場景的信息比從本地源(例如由車輛感測器收集的數據的點雲)可獲得的更多信息。
描述了AR系統的實施例,可以使用三維(3D)網格地圖數據(例如,從空中/街道攝影重建的3D tiles)來增強或補充車輛感測器(例如,LiDAR或攝像機)顯示。
3D tiles可以用於填充感測器的限制(例如,真實環境中被建築物或地形遮擋的區域,或者超出範圍)以將AR擴展到車輛前方的完整真實環境中(即,在駕駛員的視野內)。例如,可能會顯示一條路線,其中包括由真實環境中的物體或地形遮擋的部分路線。
預生成的3D網格地圖數據可用於整個360度真實環境。在車輛周圍,在遮擋物之後,並超出地平線。因此,在一些實施例中,可以利用3D網格地圖數據向車輛側面和車輛後方提供關於環境的信息,包括不可見的對象。
在一些實施例中,3D網格地圖數據可以由AR系統在差的/有限的能見度駕駛條件下使用,例如,大霧,雪,曲線山路等,其中感測器範圍可能受到限制,例如將車輛前方的路線投影到AR顯示器上。例如,3D網格地圖數據可以用於通過顯示即將到來的曲線或交叉點來增強感測器數據。(1498字;圖1)
本站相關文章:
1.自動駕駛雷達感測專利訴訟 Quanergy Systems向Velodyne LiDAR 提出確認之訴
2.自駕車輛LiDar技術之爭:Waymo LLC v. Uber專利戰開打
3.自駕車LiDAR專利訴訟 谷歌旗下Waymo告Uber竊密及侵權
4.蘋果申請一組VR / AR顯示器的雙重掃描模式專利
5.蘋果專利透露對於AR眼鏡的期待
--------------------------------------------------------------------------------------------------------------------------------------------
【聲明】
1.科技產業資訊室刊載此文不代表同意其說法或描述,僅為提供更多訊息,也不構成任何投資建議。
2.著作權所有,非經本網站書面授權同意不得將本文以任何形式修改、複製、儲存、傳播或轉載,本中心保留一切法律追訴權利。
|