
自駕車輛LiDar技術之爭:Waymo LLC v. Uber專利戰開打
科技產業資訊室 (iKnow) - Stanley 發表於 2017年7月11日
圖、Waymo LLC v. Uber專利戰:自駕車輛LiDar技術之爭
近期,Waymo LLC與Uber Technologies兩家科技廠商之間於自駕車輛商用LiDar技術的專利訴訟糾紛,揭露為何發展歷史久遠的LiDar在自駕車輛技術領域中又重新地扮演了技術商用化的重要推手(註1)。
整起訴訟案件的導火線源自於一名關鍵性人物-Google前資深工程師Anthony Levandowski。
Levandowski在UC Berkeley求學時期即已投入自駕車輛研發專案,2007年進入Google公司,從事自駕車輛前期的開發專案,直到2016年1月,自行創辦了Otto公司,並且在未告知Google公司的情況下辭職了。數月後Otto在網路公布影片並展示Otto自行研發的無人自動駕駛卡車在Nevada freeway完成長途的巡航,2016年8月Uber Technologies以$6.8億美元的天價買下Otto。於是,引爆成為Alphabet Inc.旗下子公司Waymo LLC與Uber Technologies及Otto等公司之間的訴訟(註2)。
2017年2月,原告(Waymo LLC)在北加州地方法院主張被告(Uber Technologies及Otto等公司)利用Levandowski於Google在職期間所竊取的商業機密,包括程式碼、LiDar硬體原始設計圖及自駕車輛道路測試資料等諸多數據,藉以縮短Uber在自駕車輛技術領域的研發及產品商業化的時程,其中,原告Waymo LLC更主張被告等公司的自駕車輛已侵害其US 8836922 B1、US 9086273 B1、US9,285,464及US 9368936 B1共四件專利權,雖然Uber試圖向外界澄清說明「Uber使用的是Velodyne Acoustics Inc.在市場上販售的LiDar產品,Uber並無侵害Waymo自行研發的922等LiDar專利技術」(註3)。
以下,以其中之一系爭專利US 8836922 B1(簡稱Waymo 922專利)所提出的LiDar技術與Velodyne Acoustics Inc.市售產品及專利比較如下:
為了降低LiDar技術實現的成本、提高自駕車輛技術商業化的可行性,Waymo 922專利(申請日: 2013/8/20)提出具有『單一鏡頭』的LiDar設備,經由LiDar內部元件的重新配置,使LiDar向外發射光源、以及自外部接受進入LiDar內部的反射信號都是經由相同的單一鏡頭來完成,相較於傳統將發射、接收分為至少兩個鏡頭來使用的LiDar而言,鏡頭上的簡化及元件的重新配置,實已減少LiDar設備在結構上的複雜度、元件價格及設備體積等生產製造的成本,當自駕車輛在必備的感測設備上所支出的成本能夠達到一定程度的降幅時,未來自駕車輛的產品就又更接近市場上的終端消費者一步了。
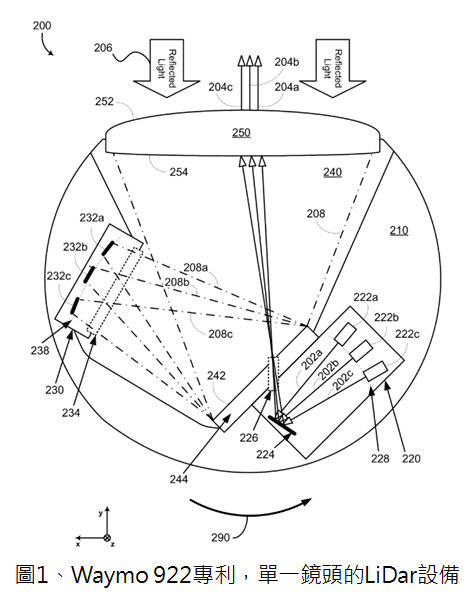
發射光源時,由模塊220其中的多個發光元件222a-c分別產生202a-c等多道具特定波長的低能量光源,再經由透鏡224折射聚焦至壁面244之上的光圈226以集中地往鏡片250發送,光束穿越光圈226後進入LiDar共用空間240由內向外經過鏡片250的環形表面254,經預準直(pre-collimate)的各光束204a-c彼此以精確平行的路徑向外部環境投射出去。
相對地,當光束204a-c與環境中已存在的物體碰觸並被反射至鏡片250時,反射光束206經由同一鏡片250之非球面表面252進入LiDar 共用空間240,所形成的聚焦光束208被投射至具有反射表面的壁面244,分散為208a-c的光線被分佈在曲面238之上的多個偵測器232a-c所接收。
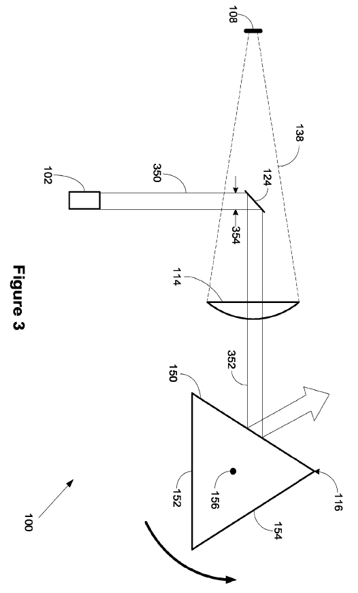
Uber對外聲稱,Uber用於自駕車輛上的LiDar係為如圖2、3所示由Velodyne Acoustics Inc.於市場上販售的「雙鏡頭」LiDar設備,由圖2(a)明顯可知,此LiDar設備具有分別用於向外投射光束的鏡頭50、及接收物體反射光束的鏡頭52,然而,此等「雙橢圓」左右平行排列的鏡頭,如圖2(b)所示,在視線的近端區域180及遠端區域184皆存在視線盲區。
為了解決此問題,Velodyne Acoustics Inc.在其提出的US 8767190 B2專利(High Definition LiDar System,申請日: 2011/5/17)中將鏡頭形狀修正為「D-type雙鏡頭」且以背靠背左右排列的方式配置,如圖3(a)(b)所示,藉此將上述視線盲區問題加以解決。
由自駕車輛所採用的LiDar設備所引發的Waymo LLC v. Uber Technologies Inc.之間的專利訴訟仍在進行中,最近法官同意Waymo提案撤回三項專利:US8,836,922; US9,285,464;US9,086,273,僅剩一項系爭專利US9,368,936 (Laser diode firing system)是與盜竊商業機密有關的核心專利。訴訟勝負將可能左右未來自駕車市場競爭力,因此,該訴訟案件的後續發展值得持續關注!(1980字;圖2)
表1-Waymo LLC v. Uber Technologies, Inc. et al之系爭專利1
US 8836922 B1
Devices and methods for a rotating LIDAR platform with a shared transmit/receive path
|
1. A light detection and ranging (LIDAR) device, comprising:
a lens mounted to a housing, wherein the housing is configured to rotate about an axis and has an interior space that includes a transmit block, a receive block, a transmit path, and a receive path, wherein the transmit block has an exit aperture in a wall that comprises a reflective surface, wherein the receive block has an entrance aperture, wherein the transmit path extends from the exit aperture to the lens, and wherein the receive path extends from the lens to the entrance aperture via the reflective surface;
a plurality of light sources in the transmit block, wherein the plurality of light sources are configured to emit a plurality of light beams through the exit aperture in a plurality of different directions, the light beams comprising light having wavelengths in a wavelength range;
a plurality of detectors in the receive block, wherein the plurality of detectors are configured to detect light having wavelengths in the wavelength range; and
wherein the lens is configured to receive the light beams via the transmit path, collimate the light beams for transmission into an environment of the LIDAR device, collect light comprising light from one or more of the collimated light beams reflected by one or more objects in the environment of the LIDAR device, and focus the collected light onto the detectors via the receive path. |
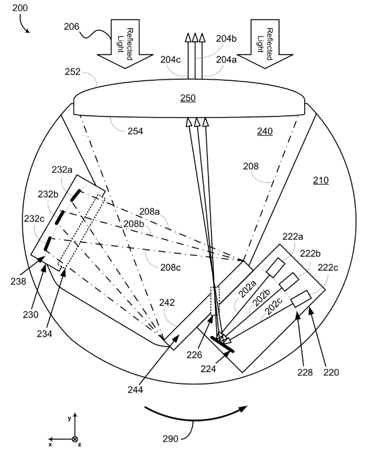 |
表2-Waymo LLC v. Uber Technologies, Inc. et al之系爭專利2, 3
US 9086273 B1
Microrod compression of laser beam in combination with transmit lens
|
1. A light detection and ranging (LIDAR) device, comprising:
at least one laser diode, wherein the at least one laser diode is configured to emit an uncollimated laser beam comprising light in a narrow wavelength range, wherein the uncollimated laser beam has a first divergence in a first direction and a second divergence in a second direction, and wherein the first divergence is greater than the second divergence;
at least one cylindrical lens, wherein the at least one cylindrical lens is configured to pre-collimate the uncollimated laser beam in the first direction to provide a partially collimated laser beam that has a third divergence in the first direction and a fourth divergence in the second direction, wherein the third divergence is less than the fourth divergence and the fourth divergence is substantially equal to the second divergence;
at least one detector, wherein the at least one detector is configured to detect light having wavelengths in the narrow wavelength range; and
an objective lens, wherein the objective lens is configured to (i) collimate the partially collimated laser beam to provide a collimated laser beam for transmission into an environment of the LIDAR device and (ii) focus object-reflected light onto the at least one detector, wherein the object-reflected light comprises light from the collimated laser beam that has reflected from one or more objects in the environment of the LIDAR device. |
 |
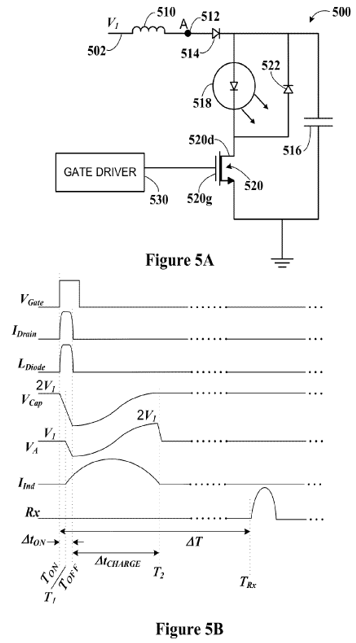
US 9368936 B1
Laser diode firing system
|
17. A light detection and ranging (LIDAR) device comprising:
a light source including:
a voltage source;
an inductor coupled to the voltage source, wherein the inductor is configured to store energy in a magnetic field;
a diode coupled to the voltage source via the inductor;
a transistor configured to be turned on and turned off by a control signal;
a light emitting element coupled to the transistor;
a capacitor coupled to a charging path and a discharge path, wherein the charging path includes the inductor and the diode, and wherein the discharge path includes the transistor and the light emitting element;
wherein, responsive to the transistor being turned off, the capacitor is configured to charge via the charging path such that a voltage across the capacitor increases from a lower voltage level to a higher voltage level and the inductor is configured to release energy stored in the magnetic field such that a current through the inductor decreases from a higher current level to a lower current level; and
wherein, responsive to the transistor being turned on, the capacitor is configured to discharge through the discharge path such that the light emitting element emits a pulse of light and the voltage across the capacitor decreases from the higher voltage level to the lower voltage level and the inductor is configured to store energy in the magnetic field such that the current through the inductor increases from the lower current level to the higher current level;
a light sensor configured to detect a reflected light signal comprising light from the emitted light pulse reflected by a reflective object; and
a controller configured to determine a distance to the reflective object based on the reflected light signal. |
 |
參考資料:
1.Uber And Google Are Fighting Over Very Old "Lidar" Technology. Here's Why. BuzzFeed News Reporter, 2017/5/16
2.Waymo v. Uber: Everything you need to know. Techcrunch, 2017/4/6
3.Uber's legal defense: Waymo does LiDAR better, for now. Engadget, 2017/4/7
本站相關文章:
1. 自駕車LiDAR專利訴訟 谷歌旗下Waymo告Uber竊密及侵權
2. 優步的挫敗,Waymo積極搶攻自動計程車市場
3. Waymo市值到底值多少?
4. 自駕車LiDAR專利訴訟 谷歌旗下Waymo告Uber竊密及侵權
5. Uber成立人工智慧實驗室 搶攻無人駕駛
--------------------------------------------------------------------------------------------------------------------------------------------
【聲明】
1.科技產業資訊室刊載此文不代表同意其說法或描述,僅為提供更多訊息,也不構成任何投資建議。
2.著作權所有,非經本網站書面授權同意不得將本文以任何形式修改、複製、儲存、傳播或轉載,本中心保留一切法律追訴權利。
|