
您準備好迎接新興的汽車雷達衛星架構了嗎?
圖、您準備好迎接新興的汽車雷達衛星架構了嗎?
隨着全球新車評估計畫的安全評級和法規對主動安全功能的要求漸趨嚴格,在現今的車輛中,安全性已成為不容妥協的特性。全球汽車製造商不斷強化車輛內的先進駕駛輔助系統 (ADAS) 功能,包括自動緊急煞車 (AEB)、智慧主動車距控制巡航系統 (ACC) 與進階車道居中等,藉此滿足前述安全要求,並且亦以更高的自動駕駛層級為目標。為了支援這些功能並符合安全法規,車輛周圍的雷達感測器數量不斷增加。
不斷進化的車輛架構
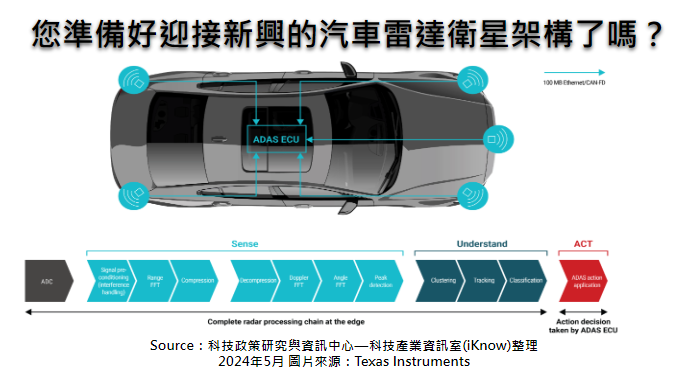
汽車系統設計人員因應 ADAS 功能實作的方式之一,就是重新考量電氣與電子系統架構的架構與整合。目前一般採用的架構為邊緣架構,由高度智慧化的雷達感測器組成,其會透過控制器區域網路或 100 Mb 乙太網路介面,將經過處理的數據串流至 ADAS 電子控制單元 (ECU)。這些感測器旨在實現高效能,其中包含處理器與通常為專用的加速器,藉此執行範圍、都卜勒和角度快速傅立葉轉換 (FFT),以及用於物件偵測、分類與追蹤的後續高階演算法。隨後,每個邊緣雷達感測器的最終物件數據均會傳送至 ADAS ECU。圖 1 以圖示說明邊緣架構。
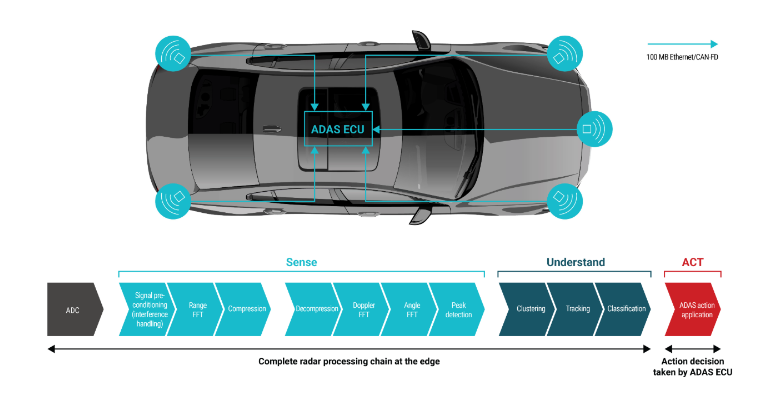
圖1、邊緣架構中的雷達感測器連接至 ADAS ECU
邊緣架構不斷進化,並逐漸受到衛星架構取代,在衛星架構中,遍佈在車輛周圍的感測頭會透過高速 1 Gb 乙太網路介面,將經過預先處理的範圍 FFT 數據傳送至強大的中央 ECU。大部分的數據處理作業都會卸載至中央 ECU (圖 2)。衛星架構可在中央處理器使用經過最少處理的數據,進行集中式數據處理,這不同於邊緣架構,因為邊緣架構則是由個別雷達感測器獨立處理所有數據。
圖2、衛星架構中的雷達感測器連接至中央 ECU
衛星架構的優點
集中式處理可實作有效的感測器融合演算法,進而提升決策準確度。有一種合適的比喻可說明此作業,那就是人類大腦會根據來自雙眼的輸入資訊做出決策,而不是根據單一眼睛獨立做出決定。原始設備製造商 (OEM) 可部署用於提高角解析度 (分散式孔徑雷達) 的演算法、最大速度的演算法,甚或是用於物件分類的機器學習演算法。將融合的感測器輸入與前述演算法相互結合後,即可提升感測性能,並產生相對精確的感知圖。對汽車製造商而言,這代表自主程度更高。對駕駛與乘客而言,這代表車輛更加安全。
此外,使用衛星雷達感測器可提升系統可擴展性和模組化特性。由於可將感測器安置在車輛周圍更為便利的位置,因此可實現許多 ADAS 應用。只要變更感測器數量或感測器配置,即可調整涵蓋的程度,因此可將具成本效益的低階車輛單一平台,擴充至具有不同自主性程度且與眾不同的頂級車輛。
衛星架構可透過感測器融合演算法,以及中央 ECU 所具備的更強大運算功能,增添價值。簡化的衛星感測器,以及透過軟體所實現的差異化,可協助降低系統複雜性,並提供創造價值的新方法。此外,使用衛星雷達也讓汽車製造商可選擇使用無線軟體更新,藉此提升系統性能並強化安全性。前述多項優點,包括性能、可擴展性和簡單性等,都是讓衛星架構能在汽車產業中擁有卓越地位的推手。
專為衛星架構設計的雷達感測器
TI 專門為衛星架構設計了 AWR2544 晶片內建雷達感測器。其採用具有四個發射器和四個接收器的整合式 77-GHz 收發器,可提供更高的範圍偵測功能和更佳的性能。此外也包含成本最佳化的雷達處理加速器,以及輸送量經強化的 1-Gbps 乙太網路介面,以產生並串流範圍 FFT 壓縮數據。此產品符合汽車安全完整性等級 B,並且可透過硬體安全性模組提供安全的執行環境。
此產品亦採用 TI 的封裝發射 (LOP) 技術設計,因此可透過印刷電路板 (PCB) 內的波導,直接將訊號從封裝輻射元件傳輸至 3D 天線。圖 3 所示為具有 3D 波導天線的 AWR2544LOP 評估模組。
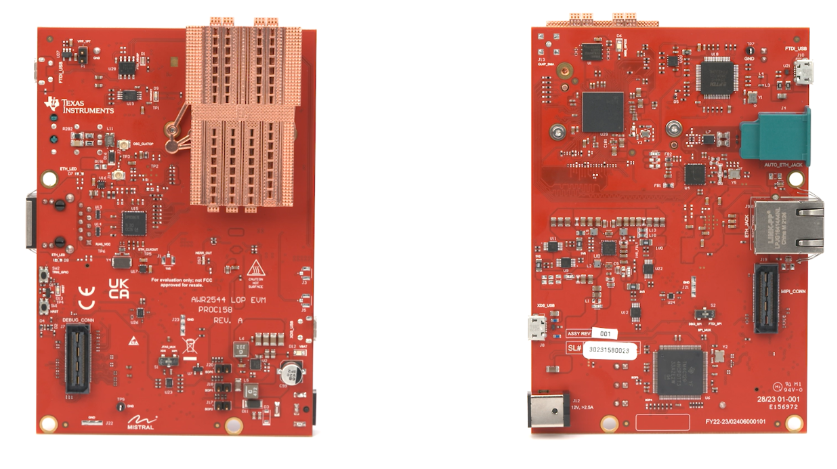 圖3、AWR2544LOP EVM
圖3、AWR2544LOP EVM
--------------------------------------------------------------------------------------------------------------------------------------------
【聲明】
1.科技產業資訊室刊載此文不代表同意其說法或描述,僅為提供更多訊息,也不構成任何投資建議。
2.著作權所有,非經本網站書面授權同意不得將本文以任何形式修改、複製、儲存、傳播或轉載,本中心保留一切法律追訴權利。
|