
自給自足多種運動型機器人Tribot
科技產業資訊室 (iKnow) - 陳品蓁、何思穎 發表於 2019年7月19日
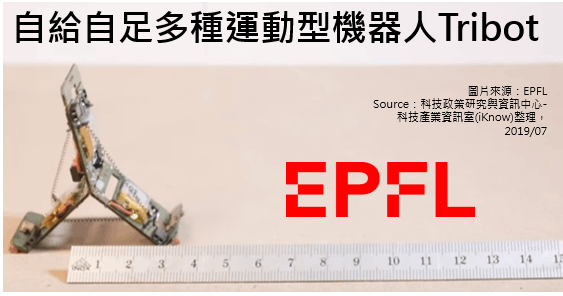
圖、自給自足多種運動型機器人Tribot
洛桑聯邦理工學院(EPFL)研究開發,展示了一種完全自給自足多種運動型(autonomous multi-locomotion)毫米機器人(millirobot)。這種昆蟲尺寸的機器人(insect-scale robot)不僅具有可調整的動力需求,還能實現五種不同的步態。
由Zhenishbek Zhakypov和Jamie Paik領導的團隊,受到鋸針蟻(dontomachus)或者稱為陷阱顎蟻(trap-jaw ants)的啟發,透過折疊的方式,以三明治結構將機械、材料和電子層堆疊整合成類2D的超材料(metamaterial)。這種設計不需大量裝配機器人,就能達到製造組裝的高效率、靈活性和可利用性。而且原型僅10克重,如手掌大小。
透過模擬多樣化的昆蟲生物力學,並研究各種環境中的集體行為,這款由電池驅動的昆蟲機器人,模仿鋸針蟻個體發展出卓越的多運動機制,可以利用最少的元件和組裝步驟,選擇性的交換步態以橫越不同的地勢,包括實現五種不同的步態:高度的垂直跳躍,距離的水平跳躍,翻跟斗跳躍以清除障礙物、在不平地形上行走和在平坦表面上爬行。
這款昆蟲尺寸的折疊機器人,其最小化的特性,以及可伸展的設計,實現了多種運動的能力。而如此的創新,對於研究小群體間的集體行為、社會間的任務分佈影響、以及大尺寸的機器人演算法發展,都有一定的助益。同樣的,雖然目前這款昆蟲機器人的機動性、感測度、計算能力仍有限,但其對災害減輕、環境監測及探索亦有所幫助。因此,該研究團隊期望朝製造過程自動化發展。(404字;圖1)
YouTube影片:Robot-ants that can jump, communicate with each other and work together
參考資料:
Like the real thing, this robot ant colony is more than the sum of its parts, DigitalTrends, 2019/7/15
Tiny ant-inspired Tribots embrace collective intelligence to tackle big tasks, NewAtlas, 2019/7/11
Designing minimal and scalable insect-inspired multi-locomotion millirobots. Nature, 2019/7/10
本站相關資料:
1. 2019年機器人領域值得關注五大趨勢
2. 機器人Anki倒閉,衝擊消費性機器人市場
3. 非侵入式視力矯正結合AI演算法
4. 美國DARPA計畫將昆蟲大腦放入機器人
5. 仿生奈米結構塑形技術
--------------------------------------------------------------------------------------------------------------------------------------------
【聲明】
1.科技產業資訊室刊載此文不代表同意其說法或描述,僅為提供更多訊息,也不構成任何投資建議。
2.著作權所有,非經本網站書面授權同意不得將本文以任何形式修改、複製、儲存、傳播或轉載,本中心保留一切法律追訴權利。
|