2013至2016年期間,電腦大廠IBM公司(International Business Machines Corporation)向美國專利商標局(USPTO)申請一系列關於「自動駕駛車輛(self-driving vehicle, SDV)安全智慧化」的發明專利,結合了生物認知、神經計算科學及電腦網路、無線通訊等科技替車輛的「感知能力」升級,使車輛除了能偵測車況及所處環境外,對於駕駛人行為更具有感知(cognitive)學習的能力。
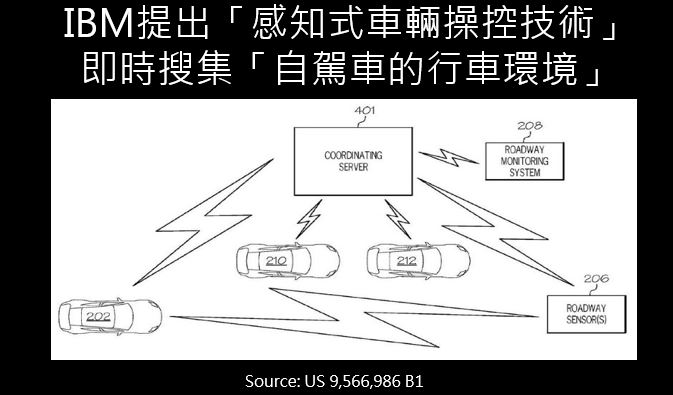
未來,極可能是一個在道路上充滿了自動駕駛車輛(以下簡稱自駕車)的新時代,但在車輛全面進入自動駕駛時代之前,仍有一段過渡時期是「人駕車」與「各式自駕車」共同地行駛於道路上的,為此IBM提出一系列專利申請案(見表1),運用「感知式車輛操控技術」提供解決方案,使車輛透過感知系統即時搜集駕駛人的行車行為(human behavior)與操控習慣,在適當的時機更由系統判斷是否須主動地切換車輛的控制權,藉以協助駕駛人免於因緊急情況或周圍自駕車等影響所導致的意外事故。
表1、IBM於2013至2016年期間申請的專利家族(INPADOC patent family)申請案一覽
|
專利家族
|
申請日
|
申請別
|
申請號
|
主要發明人
|
相關申請案或其他公開資訊
|
公開號
|
公告號或案件狀態
|
|
#1
|
2013/1/10
|
US
|
13/738,317
|
James R. Kozloski (US)、
Timothy M. Lynar (AU)
|
n/a
|
US 2014/0195213A1
(2014/1/10公開)
|
US 9,361,409 B2
(2016/6/7授權)
|
|
2013/8/8
|
US
|
13/962,177
|
13/738,317
|
US 2014/0195214A1
(2014/7/10公開)
|
US 9,576,083 B2
(2017/2/21授權)
|
|
2014/1/6
|
PCT
|
US2014/010,283
|
13/738,317
|
WO 2014/109973A1
(20140717公開)
|
n/a
(2015/9/16撤回)
|
|
2016/10/10
|
US
|
15/289,749
|
13/738,317、13/962,177
|
US 2017/0032067A1
(2017/2/2公開)
|
patent pending
|
|
#2
|
2015/8/7
|
US
|
14/820,620
|
Michael S. Gordon (US)、
James R. Kozloski (US)
|
n/a
|
US 2017/0038773A1
(2017/2/9公開)
|
patent pending
|
|
#3
|
2015/8/24
|
US
|
14/833,652
|
Michael S. Gordon (US)、
James R. Kozloski (US)
|
n/a
|
US 2017/0057507A1
(2017/3/2公開)
|
patent pending
|
|
#4
|
2015/9/25
|
US
|
14/865,393
|
Michael S. Gordon (US)、
James R. Kozloski (US)
|
14/887,388
(其他公開)
|
n/a
|
US 9,566,986 B1
(2017/2/14授權)
|
|
2016/11/2
|
US
|
15/341,225
|
14/865,393
|
US 2017/0088145A1
(2017/3/30公開)
|
patent pending
|
|
#5
|
2015/11/17
|
US
|
14/944,031
|
Gregory J. Boss (US)、
Rick A. Hamilton (US)
|
IEEE paper
(其他公開)
|
n/a
|
US 9,457,665 B1
(2016/10/4授權)
|
備註:
第一(#1)專利家族的主要CPC分類號及分類號資訊,包括:
-
G06F 17/5009 (2013.01)、G06F 17/5095 (2013.01):利用電腦輔助模擬設計,特別適用於車輛或飛機的數位運算或資料處理的設備或方法。
-
G08C 1/0112 (2013.01)、G08C 1/0129 (2013.01):藉由偵測所欲計數或控制的交通運輸活動,指用於道路車輛之交通運輸控制的系統,尤其是基於來自車輛所發送的來源資料、以及關於與歷史交通資料交通狀況有關的相關參數之量測及分析。
第四(#4)專利家族的主要CPC分類號及分類號資訊,包括:
-
B60W50/082 (2013.01)、B60W50/12 (2013.01):車輛次系統或次單元之間的聯合控制,不限於特定的次系統或次單元,尤指能居於駕駛人與車輛控制系統之間作為協調控制,並從不同的動力推進模式中執行選擇或切換,以及為避免不安全的人為操控而依據車況來限制駕駛人對於車輛控制的系統或方法。
-
G05D1/0061 (2013.01)、G05D1/0088 (2013.01):用以控制或調整非電氣類之變數的系統,如調整用於自動駕駛系統中的位置、路程、高度或水、空氣等變數的系統,尤指伴隨有切換安全配置、且針對從自動領航及手動領航間變換狀態,以及基於提前預測的行為模式決定操作模式的系統。
表1所列,係依各專利家族中的第一個申請案的申請日做排序的,IBM的專利佈局仍以美國為主要申請國家,其中至少包括五個相關的專利家族:
以US 9,361,409 B2為首的第一專利家族是其核心技術之一(參照圖1),目的是為了調和「人駕車」與「自駕車」彼此間在道路上的行車關係、降低碰撞事故機率,而所謂的「感知技術」其實是以一或多個被裝設於車輛上的駕駛人生理感測器(biological sensors)感測駕駛人的開車行為,並與先前建置於歷史資料庫中的駕駛人行為樣本(behavior patterns of driver)進行比對分析,一方面監測駕駛人目前的動態行車行為,二方面以新近搜集的行車行為資料更新過去的行為樣本,使得車輛能夠更精確地掌握駕駛人的行車狀態。
用於提升自動駕駛車輛操控安全性之駕駛人行為模式的感知方法
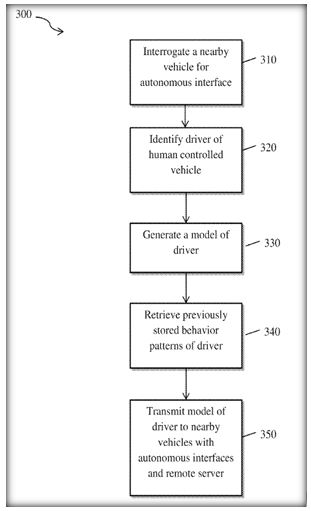
Source: 美國專利US 9,361,409 B2, published on 2014/1/10, granted on 2016/6/7.
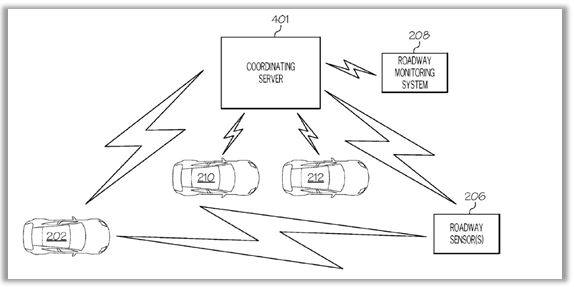
其次,IBM提出以US 9,566,986 B1為首的第四專利家族作為其核心技術之二(參照圖2),進一步地將駕駛人資訊應用於智慧化車輛的安全性操控,搭配車上所配備的網路通訊模組,將本車感知到的駕駛人行為資訊廣播給鄰近自駕車系統使用,本車也接收外部鄰車的駕駛、路況、交通等資訊來進行利用,此外,表1所列的第二(US 2017/0038773 A1)及第三(US 2017/0057507 A1)專利家族亦已提出相關的技術方案申請在案。
當「車輛感知系統」經資訊搜集及分析,若判斷目前「人駕車」處於高風險的行車狀態時,如車輛正行經大霧路段或遭遇大燈燒燬等情況下,「車輛控制系統」會在適當時機將車輛控制權交由系統來自動駕駛,惟一旦前述路況解除,系統會釋放自動駕駛模式而將車輛控制權再次地交回給駕駛人員接管車輛,進而提升「人駕車」處於動態變化的「自駕車」交通環境中的行車安全。
用於選擇切換自動駕駛車輛操控模式的系統及方法
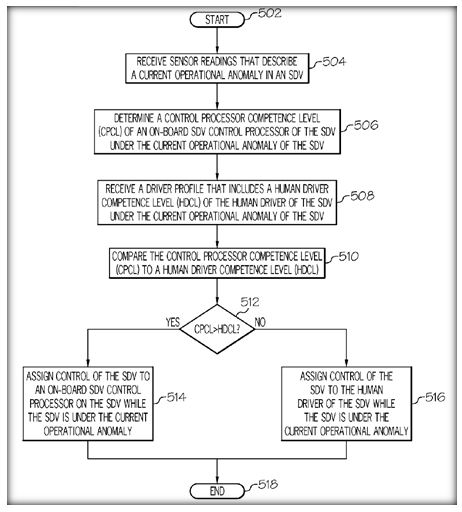
Source: US 9,566,986 B1, filed on 2015/9/25, granted on 2017/2/14.美國專利
就IBM所提出的核心專利技術而言,車輛的控制原則上還是以人員操控為主,具有感知駕駛人生理狀態資訊能力的自動駕駛系統係作為行車安全之輔助系統,僅在緊急且必要情形會短暫地介入車輛的行車控制,以調和「人駕車」與「自駕車」共同行駛於實際道路上的動態行車關係,使「人駕車」在「自駕車」所形成的“車輛聯網”中也能安全的行駛且互不干擾,即“integrating human-controlled vehicles into an autonomous vehicle network”之意,其中,應用至本文所提的「人駕車」的技術至少包含有:駕駛人生理資訊感測、車輛定位/定向、車內電控單元間的網路通訊、車輛間(V2V)的短距無線通訊、車輛與外部基礎設施間(V2I)長距無線通訊等。
最後,如此複雜的行車資訊應如何呈現給駕駛人來讀取就顯得相當重要了,參見表1所列的第五專利家族(US 9,457,665 B1)所提出的申請案即為與行車資訊顯示的人機介面有關之技術方案。(1642字;圖1;表1)
參考資料:
-
-
-
--Backup Information--
GP searching KWs: inassignee:"International Business Machines Corporation", Cognitive System to Manage Self-Driving Vehicles
Google search KWs: IEEE VTC, IBM, cognitive, vehicle https://www.ibm.com/internet-of-things/iot-zones/iot-vehicles/
本站相關文章:
- 2035年全球自動駕駛車可達2100萬輛
- 軟銀集團投資自動駕駛車 從小型巴士與卡車切入
- 全球30家公司投入無人駕駛車研發
- 谷歌自駕車事業將獨立 加州法規草案公布
- 自動駕駛技術美俄地區潛在市場民調
--------------------------------------------------------------------------------------------------------------------------------------------