
讓機器人擁有接觸物體的感受
科技產業資訊室 (iKnow) - 黃松勳 發表於 2019年5月3日
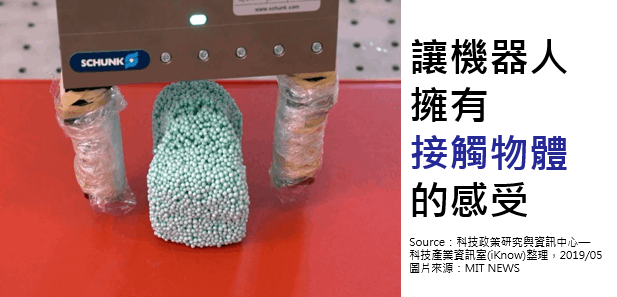
圖、讓機器人擁有接觸物體的感受
在5月份的國際學習表徵會議(ICLR)即將發表的研究,麻省理工學院的研究人員開發一種新的粒子模擬學習系統,可提高機器人將材料模塑成目標形狀的能力,並預測固態物體和液體的相互作用,可以為工業機器人提供更精細的觸摸,使機器人能應用於塑造粘土形狀或滾動糯米飯製作壽司。
研究人員利用一種粒子交互網絡(DPI-Nets)的新模型,可獲取粒子間動態交互作用的複雜行為。在運動的基礎物理學不確定或未知的情況下,該模型可直接從數據中學習,機器人可依據模型來預測液體以及剛性和可變形材料的觸摸力學動態變化,並作出反應。當機器人接觸物體時,該模型還有助於進一步細化機器人的控制。
研究人員透過RiceGrip機器人夾取泡沫可變形的物體來演示該模型。機器人利用深度感應攝影機和物體識別技術來辨識泡沫,接著感知物體形狀內的顆粒,並依照可變的動態圖形模型來重建泡沫形狀。經由模擬的學習,機器人已經可以在一定量的力的觸摸中情況下,理解物體內部粒子是如何受到改變。當機器人實際壓縮泡沫時,模擬系統會迭代地將粒子的真實位置與粒子的目標位置相匹配,只要粒子不對齊,就會向模型發送錯誤信號,並調整模型來匹配材料的真實物理狀態。
研究人員目前正持續改進模型,希望能夠透過圖像直接操作將模型與端點感知模組相結合,幫助機器人可以更好地預測與部分可觀察情景的相互作用。(539字;圖1)
參考資料:
Giving robots a better feel for object manipulation. MIT News,2109/4/16
Learning Particle Dynamics for Manipulating Rigid Bodies, Deformable Objects, and Fluids. arXiv. Org,2019/4/19
Learning Particle Dynamics for Manipulating Rigid Bodies, Deformable Objects, and Fluids. Open Review,2019/4/18
本站相關資料
1.前瞻技術脈動:光子技術(201802)
2.谷歌將機器學習與人工智慧設為優先發展事項
3.GF成立Avera Semi全資子公司,提供定制ASIC解決方案
4.人工智慧:未來決策制定的機遇與影響
5.MIT等大學研發出具備圖靈測試的人工智慧系統
--------------------------------------------------------------------------------------------------------------------------------------------
【聲明】
1.科技產業資訊室刊載此文不代表同意其說法或描述,僅為提供更多訊息,也不構成任何投資建議。
2.著作權所有,非經本網站書面授權同意不得將本文以任何形式修改、複製、儲存、傳播或轉載,本中心保留一切法律追訴權利。
|