
天氣將成為完全自動駕駛的障礙 WaveSense探地雷達提高精準度
科技產業資訊室 (iKnow) - Kyle 發表於 2018年11月6日
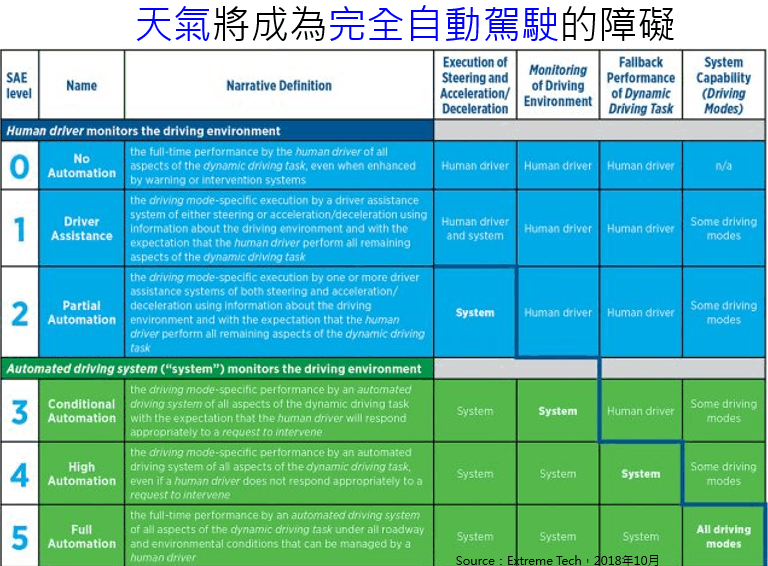
圖、自動駕駛汽車的級數比較
許多部署自動駕駛汽車技術的公司認為,只需幾年時間在技術上就能夠在不需要駕駛員干涉的情況下,達到第五級全自動駕駛水準。一旦法規完全制定完畢,人類就可以正式進入完全自動駕駛的時代。
可是根據許多研究機構的追蹤,現實情況似乎並非想像中的那麼簡單。因為自動駕駛車對於沙漠,南極洲或其它罕見氣候的地區,仍舊存在著重大問題需要克服。在全球的許多地區都擁有不同的氣候情況,即使聚焦在最早實施自動駕駛的美國,也是如此。例如:有些地區雨雪是常見的氣候,有些地區還有颶風、龍捲風造成的強風,或強雨,冬季更有暴風雪的可能性,這對於自動駕駛車技術顯然有很大挑戰。
簡單來說,雨、雪、風、霧會改變了自動駕駛車輛識別街道的方式。相機在大霧、大雨或大雪中基本上是無用的,因為激光雷達相機對這幾種情況都會呈現反射作用,以至於無法辨識。至於採用GPS識別,由於缺乏獨立導航服務所需的精確度,因此也不太可靠。
為了突破這一困境,WaveSense公司研發出一種探地掃描雷達系統(GPR)來建立一份紀錄地下特徵的地圖,也就是說,探地雷達(GPR)使用高頻(VHF)雷達來反射而生成地下特徵基準地圖,然後將當前的GPR反射與這些基準地圖進行匹配,以確定車輛的位置,具有厘米級精準度。
對於地下感測而言,GPR是當今最通用及最多樣的感測模式之一。至於WaveSense開發GPR是如何運作的?根據從WaveSense網站所描述,從雷達、映射到追蹤,如下:
- 雷達進行掃描:探地雷達系統運作,藉由將電磁輻射脈衝發射到地面並測量源自地表下方散射點的反射來工作。反射發生在具有不同電磁特性的物體之間的界面上,例如:周圍的管線、樹根和岩石。GPR反射剖面,不僅是這些離散的物體而是地下地質中的自然不均勻性,還有土壤層和水分含量的變化導致數據中的反射。因此,GPR描繪了地下環境的完整畫面。除少數例外情況外,只要它波長不太小並且與周圍土壤具有足夠的對比度,幾乎每個離散的物體和土壤特徵都被捕獲到。
- 映射:GPR過程的第一步是開發道路下方的環境地圖。第一步驟,簡單地收集地下“物體”的GPR數據以及GPS標籤以形成地下特徵的初始數據庫。然後將該地下地圖用作參考數據集,以便估計車輛位置。
- 跟踪:在幾個步驟中執行連網本地化。當車輛行駛時,週期性地從數據庫中提取數據以進行匹配,始終保持基線數據的本地網格,圍繞初始位置估計的搜索區域包含表示候選位置和方向的“粒子”(網格上的點)。再透過演算法迭代地評估粒子以縮小對車輛於五維空間(東向,北向,高度,滾動和航向)內的最大相關性的搜索。在幾次迭代之後,選擇最高相關粒子作為車輛當前位置和方向的最可能估計。
目前市場上對於自動駕駛汽車的想法,都是停留在實際車輛的銷售情況,也就是針對該車輛中所內含的自身定位和最佳駕駛參數等所需的硬體,而不是與外部連接的車輛與基礎建設。
隨著自動駕駛概念的推廣以來,社會也逐漸在接受未來某一個時間點,具有L五級自動駕駛能力的汽車勢必會來臨。但是要達到一個廣泛被採用之前,其障礙還不是現今汽車廠商所能夠想像的。(705字)
參考資料:
Self-Driving Cars Still Can’t Handle Snow, Rain, or Heavy Weather. Extreme Tech,2018/10/30
本站相關資料:
1.共享汽車是自動駕駛技術之早期推動者?
2.自動駕駛車可能顛覆其他33個行業
3.無人駕駛車離現實還有多遠?
4.無人駕駛車的前哨戰…日本正在掀起叫車服務大戰
5.中國汽車產業 訂10年發展計畫
--------------------------------------------------------------------------------------------------------------------------------------------
【聲明】
1.科技產業資訊室刊載此文不代表同意其說法或描述,僅為提供更多訊息,也不構成任何投資建議。
2.著作權所有,非經本網站書面授權同意不得將本文以任何形式修改、複製、儲存、傳播或轉載,本中心保留一切法律追訴權利。
|